motor servo bilen ýokary takyklykly kebşirleýji pozisioner

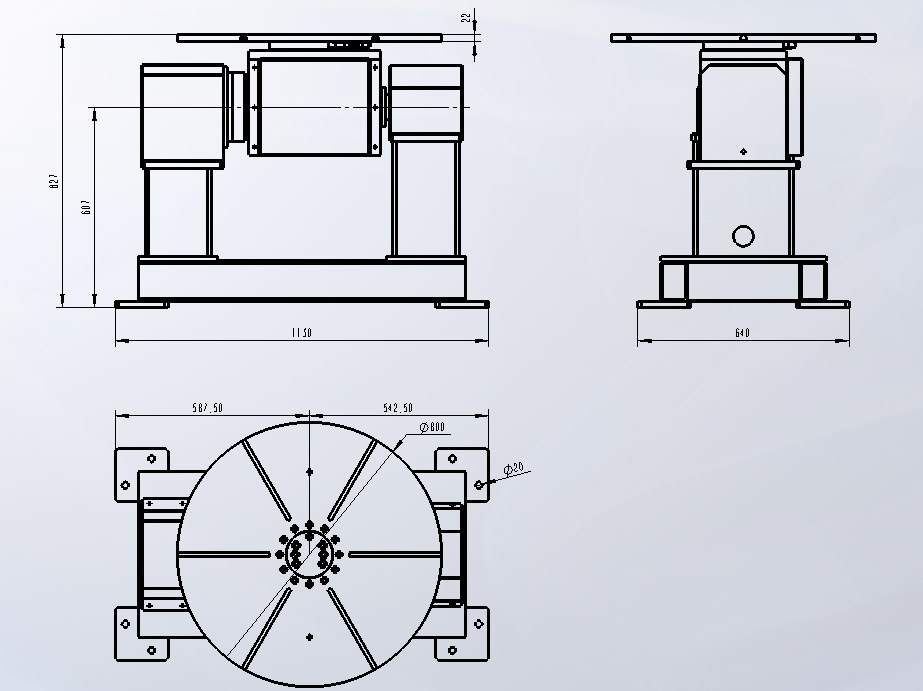
Pozisioneriň ölçegleri
Beýany
2 OKLY SERVO POZISSIONERI
- Kebşirleýji robot ulgamlary üçin pozisionerler
-1 ok gorizontal ýagdaýda öwrülip bilner, beýleki ok bolsa ýokary we aşak öwrülip bilner, bu bolsa çylşyrymly iş böleklerini köpburçly kebşirlemek üçin ulanylýar.
- Pozisioner robot bilen birmeňzeş sürüji enjamy ulanýar we ýokary tizlik, ýokary takyklyk we ýokary ýük göterijilik bilen elýeterlidir
- Ýokary kebşirleme hilini üpjün edýär
- Ýokarlandyrylan rugsat berilýän moment, inersiýa we ýük göterijilik ukyby bolan ykjam göwre amala aşyrylyp bilner
Fanuc, ABB, KUKA, Yaskawa ýaly beýleki robot markalaryna uýgunlaşdyrylyp bilner. (motor çyzgysyny müşderiler hödürlemeli, soňra motor çyzgysyna esaslanyp gurnama deşigini galdyrýarys)
PLC şkafy isleg boýunça bar.
Pozisioneriň diametri
| Model | JHY4030P-080 |
| Giriş woltajynyň nominal derejesi | Bir fazaly 220V, 50/60HZ |
| Motor izolýasiýasynyň klasy | F |
| Iş stoly | Diametri 800 mm (öz islegiňize görä sazlap bolýar) |
| Agram | Takmynan 400 kg |
| Maksimum ýük | Ok boýunça ýük göterijilik ≤300kg / ≤500kg (>500kg öz islegiňize görä sazlanyp bilner) |
| Gaýtalanýanlyk | ±0.1mm |
| Duralga pozisiýasy | Islendik wezipe |
Paket: Agaçdan ýasalan gaplar
Eltip bermek möhleti: öňünden töleg alnandan soň 40 gün
Köp soralýan soraglar
1.S: Siziň pozisioneriňizi fanuc/abb/kuka/yaskawa robotym üçin ulanyp bilerinmi?
A: Hawa. Ýöne motory özüňiz hödürläp we gurnap bermeli.
2.S: Siziň ýerleşýän ýeriňiz robotyňyz bilen deň derejede hereket edip bilermi?
A: Hawa.




