Paslanmaýan polatdan kebşirlemek üçin hytaý ýokary hilli Mig kebşirleme roboty







Robot göwresi
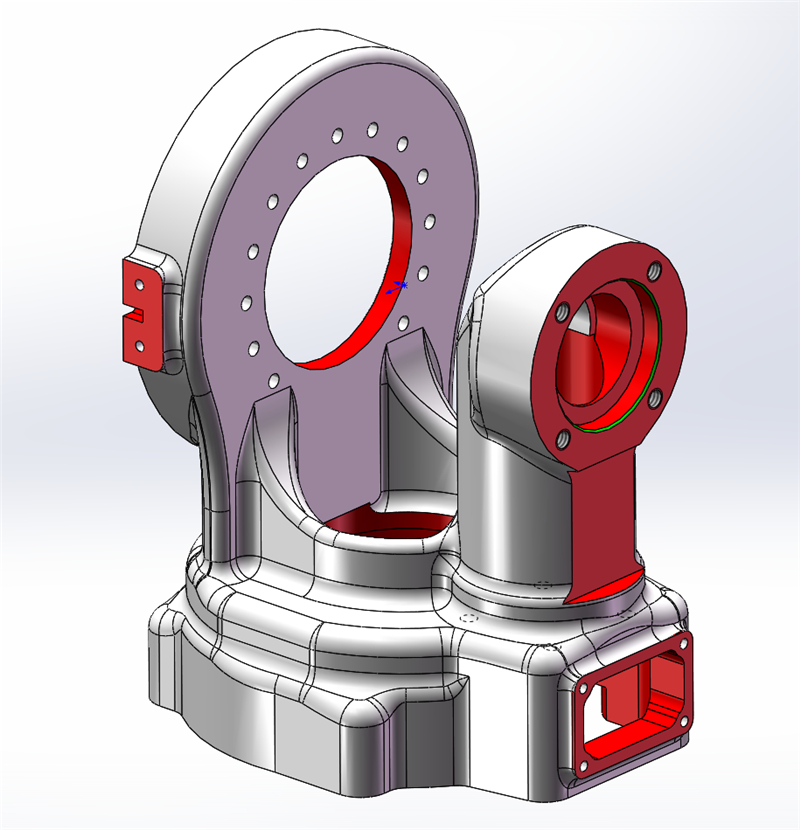
JHY roboty, esasan, döküm prosesinde we göwräniň jikme-jik dizaýnynda üýtgeýär. Biziň ylmy-barlag we işläp çykaryş toparymyz robot göwräsiniň dizaýnynda köp täzelikler girizdi we ondan gowrak täze oýlap tapyş patentlerine eýe boldy.
Mysal üçin, altynjy ok ýokary takyklykly geçiriji mehanizmini işläp düzdi we berkidiji tirkegleri dizaýn etdi, şeýle hem altynjy tigir çykyş diski dişlisiz dizaýny kabul etdi, bu bolsa robotyň takyklygyny we durnuklylygyny ep-esli gowulandyrdy. Kebşirleýji çyra kyn ýagdaýda işlese-de, durnuklylygy we sarsmazlygy üpjün edip biler. Bu nokady ýerli müşderilerimiz tassyklady.
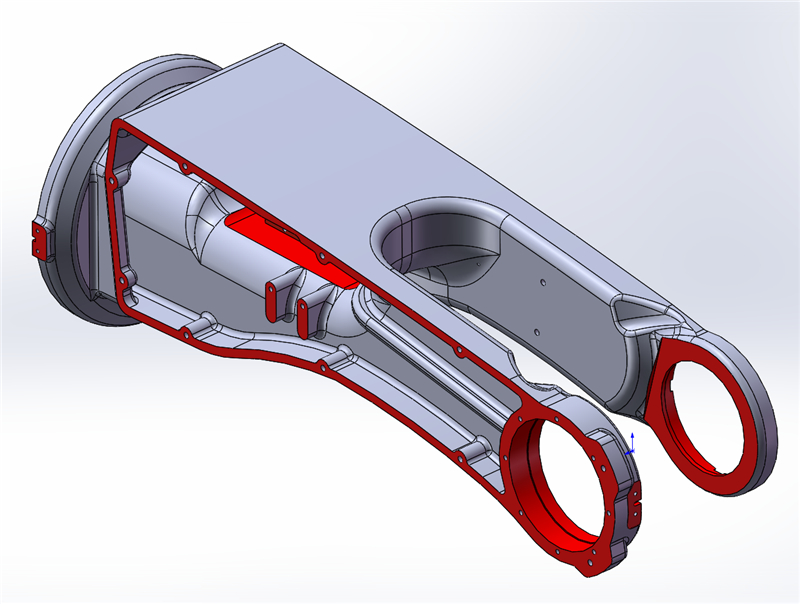
Robotyň göwresi döküm tehnologiýasy arkaly öndürilýär, bu bolsa biziň robotlarymyzy ýokary dykyzlyga eýe, ýeňil edýär. Öňki gol has dar we uzyn bolup biler, ýokarky gol bilen öň goluň arasyndaky gatnaşyk altyn gatnaşykly ululyga ýakyn, şonuň üçin has çeýe we çalt hereket edýär.
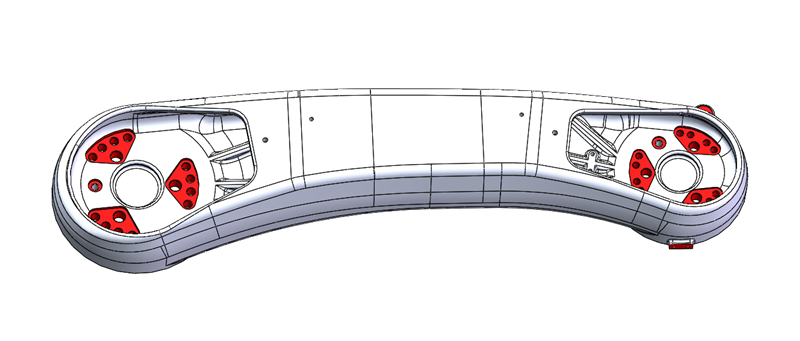
Kontur dizaýny
Robotyň öň tarapyndaky göni gol dizaýny has ýönekeý we ajaýyp. Dizaýn duýgusy bilen, Ýewropa bazarynyň estetikasyna has laýyk gelýär. Robotyň göwresiniň dizaýny birnäçe tehniki patent üçin ýüz tutdy, täze robotyň göwresi has kämil.
Simleriň iň gowy markasy
Robotyň içki simleri we terminallary ABB we Fanuc bilen birmeňzeş DYEDEN, TAIYO ýaly öňdebaryjy ýapon brendleri tarapyndan öndürilýär.
Terminal: Italiýanyň Yierma markasy.
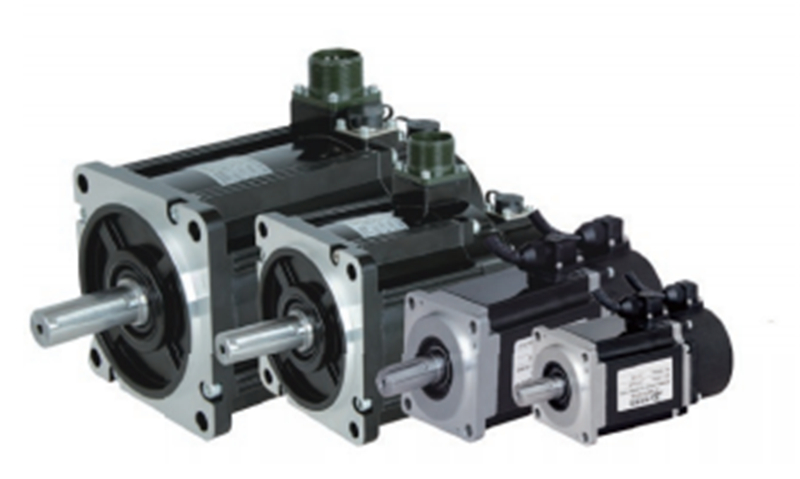
Servo Motor / Sürüji / Reduktoryň öňdebaryjy brendleri
Olaryň hemmesi Hytaýdaky öňdebaryjy brendleri ulanýar. Her bir brend soňky karar kabul edilmezden öň uzak wagtlap synagdan geçirildi we derňeldi, şonuň üçin bu brendleriň robotlarymyz üçin amatlydygyna, hiliniň we işiniň durnukly we ygtybarlydygyna göz ýetirmek üçin.
J1 we J2 oklary dişli çarhyň aşynmagyny azaldýan we reduktoryň hyzmat möhletini uzaldýan 65 Nm çenli momentli üç sany eksentrik walyň dizaýnyny kabul edýär. JHY robot J1 we J3 ok reduktorlary häzirki wagtda Hytaýda iň ýokary konfigurasiýadyr.
Servo motor barada aýdylanda, häzir biz robotlar üçin iň köp 3 kW motor ulanýarys.
1,8 m we 2 m robotlar üçin 1-nji we 2-nji oklara zerur hereketlendiriji güýç has uly, şeýle hem hereketlendirijiniň güýjüne bolan talaplar hem has ýokarydyr.
Ýokary takyklykly we köp spesifikasiýaly motorlar robotymyz üçin ulanylýan talaplary doly kanagatlandyryp bilýär.

3 ýyl/7500 sagat tehniki hyzmat gerek däl
Hyzmat etmek ýönekeý, müşderileriň özi hem ony aňsatlyk bilen dolandyryp bilerler.
Beýleki patentler we dizaýnlar
6 okly ikinji derejeli geçiriji Iki kemer birikmesine üýtgedildi, geçirijilik gatnaşygyny artdyrdy we 6 oklynyň gaty çalt we nädogry hereket etmegi meselesini çözdi. Altynjy okly çykyş diski dişli çarhlarsyz, ýokary takyklykly geçirijilik mehanizmi bilen döredildi, bu bolsa altynjy oklynyň hereketiniň takyklygyny ýokarlandyrýar... Häzirki wagtda bizde kebşirleýji robot üçin 30-dan gowrak degişli patent bar.
Wideo
Parametrler
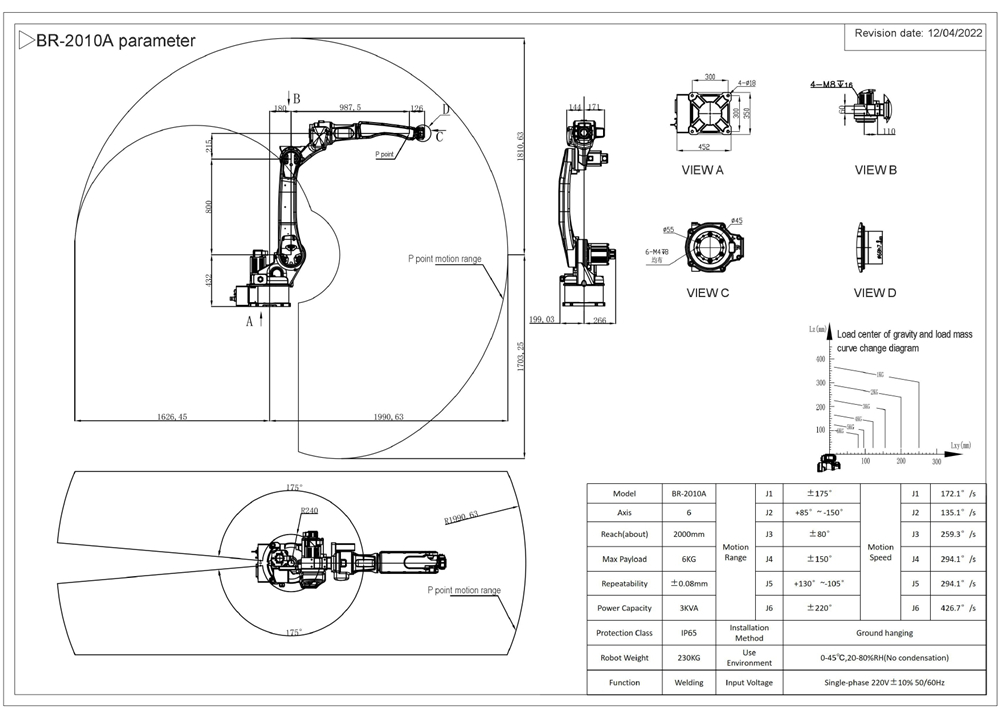
| Model | BR-2010A | Hereket aralygy | J1 | ±175° | Hereket tizligi | J1 | 172.1°/s |
| Ok | 6 | J2 | +85°~ -150° | J2 | 135.1°/s | ||
| Elýetmek (takmynan) | 2000 mm | J3 | ±80° | J3 | 259.3°/s | ||
| Maksimum ýük | 6KG | J4 | ±150° | J4 | 294.1°/s | ||
| Gaýtalanýanlyk | ±0.08mm | J5 | +130°~-105° | J5 | 294.1°/s | ||
| Güýç kuwwaty | 3KVA | J6 | ±220° | J6 | 426.7°/s | ||
| Gorag klasy | IP65 | Gurnamak usuly | Ýerden asma | ||||
| Robotyň agramy | 230KG | Gurşawy ulanyň | 0-45℃, 20-80% RH (Kondensasiýa ýok) | ||||
| Funksiýa | Kebşirleme | Giriş woltasy | Bir fazaly 220V±10% 50/60Hz | ||||
Önümleriň kategoriýalary
-

6 okly pes çaýkalýan MIG kebşirleýji robot diapazony 1800 mm
-

6 okly MIG MAG kebşirleýji robot diapazony 1500mm ... bilen
-

Mebelleri kebşirlemek üçin ulanylýan ýokary hilli kebşirleme roboty
-

JHY 6 okly robot goly senagat awtomatiki ýaý m...
-

Uglerodly kebşirlemek üçin 2000 mm ýetýän kebşirleýji robot ...
-

Paslanmaýan laklar üçin 2000 mm aralykly MIG kebşirleme roboty...