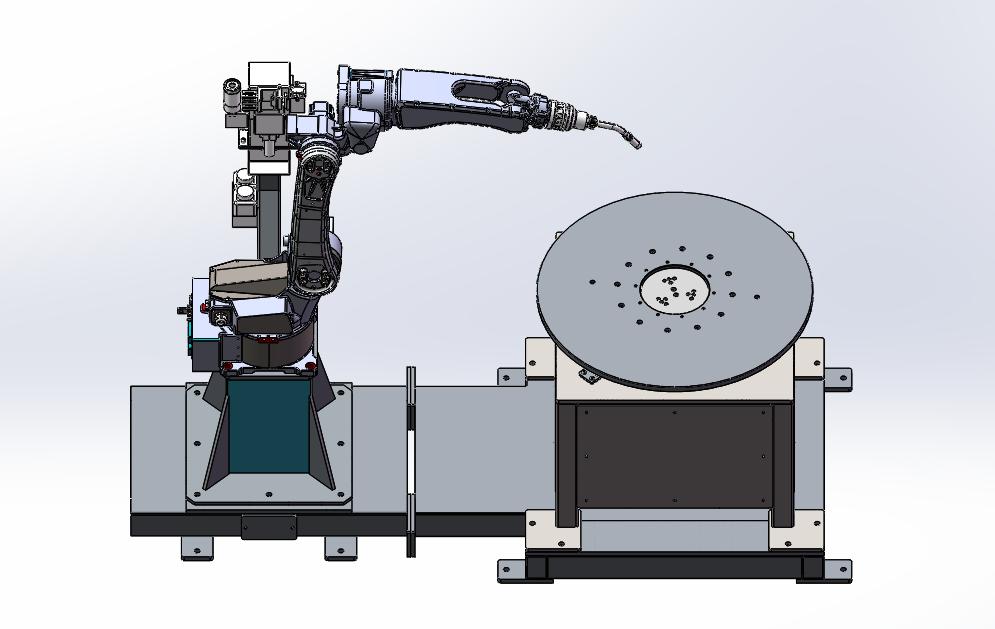
6 okly poslamaýan polatdan ýasalan alýumin kebşirleme robot iş stansiýasy






Aýratynlyk
1. Robotyň gurlan kabel dizaýny robotyň päsgelçiliksiz hereket etmegine mümkinçilik berýär we iş stansiýasynyň gurluşy arassa we tertipli.
2. Robot dolandyryş şkafy 11 okda çenli dolandyryp bilýär, bu bolsa PLC-niň çylşyrymly sazlamalaryndan we boşlugyň eýelenmeginiň öňüni alýar
3. JHY roboty we pozisioner sinhronlaşdyrylyp bilner we pozisioner aýlanýan wagty robot bir wagtda kebşirläp bilýär, bu bolsa bu iş stansiýasyny aýlawly kebşirlemek üçin has amatly edýär.
4. Lazer datçikleri, howpsuzlyk çyrasy perdeleri we howpsuzlyk gabalary ýaly kömekçi enjamlaryň giň görnüşi bar.
5. Dolandyryş ulgamy dürli iş bölekleri üçin dürli kebşirleme režimlerini ulanmaga mümkinçilik berýän birnäçe kebşirleme proses paketlerini öz içine alýar.
Pozisioneriň tehniki parametri
| Model | JHY4030D-080 |
| Giriş woltajynyň nominal derejesi | Bir fazaly 220V, 50/60HZ |
| Motor izolýasiýasynyň kalibrleri | F |
| Iş stoly | Diametri 800 mm (öz islegiňize görä sazlap bolýar) |
| Agram | Takmynan 400 kg |
| Maksimum ýük | Ok boýunça ýük ≤300kg / ≤500kg / ≤1000kg (>1000kg öz islegiňize görä sazlanyp bilner) |
| Gaýtalanýanlyk | ±0.1mm |
| Duralga pozisiýasy | Islendik wezipe |
Robot iş stansiýasynyň bölekleri
1. Kebşirleýji robot:
Görnüş: MIG kebşirleme roboty-BR-1510A, BR-1810A, BR-2010A
TIG kebşirleme roboty: BR-1510B, BR-1920B
Lazer bilen kebşirleme roboty: BR-1410G, BR-1610G
2. Pozisioner
Model: JHY4030D-080
Görnüş: 1 okly gorizontal aýlanýan pozisioner
3. Kebşirleme energiýasynyň çeşmesi
Görnüş: 350A/500A kebşirleme energiýa çeşmesi
4. Kebşirleýji tabança
Görnüşi: howa bilen sowadylýan tüpeň, suw bilen sowadylýan tüpeň, basylýan tüpeň
5. Torç arassalaýyş stansiýasy:
Model: SC220A
Görnüş: Awtomatiki pnewmatiki kebşirleme çyrasyny arassalaýjy
Beýleki robot iş ýeri periferiýa enjamlary
1. Robot hereket edýän rels
Model: JHY6050A-030
2.Lazer sensory (isleg boýunça)
Funksiýasy: kebşirleme yzarlamak, ýerleşdirmek.
3. Howpsuzlyk çyrasy perdesi (isleg boýunça)
Gorag aralygy: 0.1-2m, 0.1-5m; gorag beýikligi: 140-3180mm
4. Howpsuzlyk gardy (isleg boýunça)
5.PLC şkafy (isleg boýunça)
Önümleriň kategoriýalary
-

6 okly welsli Mig Tig robot kebşirleme stansiýasy...
-

CE sertifikatlaşdyrylan 6 okly polatdan ýasalan pulsly...
-

Mebelleri kebşirlemek üçin ulanylýan ýokary hilli kebşirleme roboty
-

Lazer bilen kebşirleme roboty 1400 mm ýetýär
-

6 okly polatdan ýasalan alýumin kebşirleme roboty...
-

Ýokary takyklykly RV reduktorly kebşirleýji pozisioner