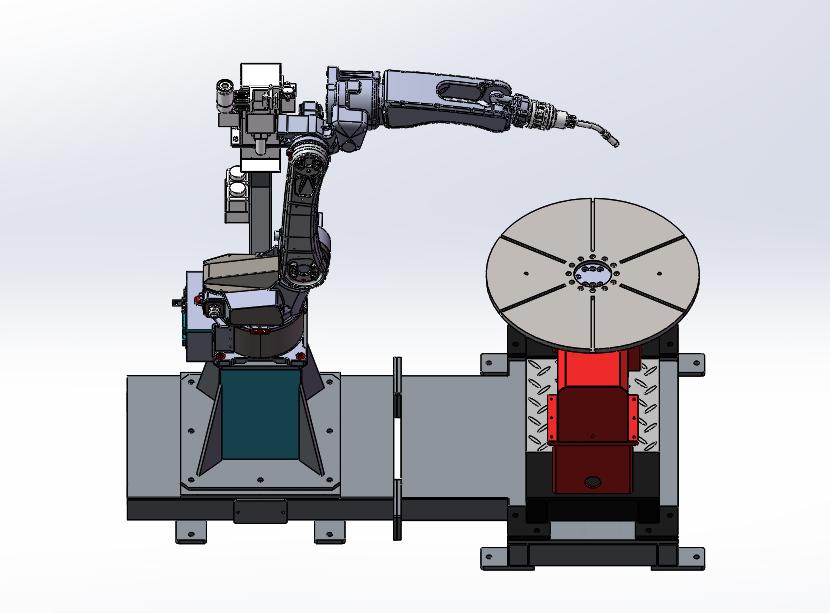
6 okly poslamaýan polatdan ýasalan alýumin kebşirleme robot iş stansiýasy






Beýany
2 okly pozisioner ±180° gorizontal aýlanmaga we öwrülmäge mümkinçilik berýär.
Pozisioneriň aýlanmagy robot dolandyryş şkafynyň aşagynda birleşýän dolandyryş şkafy tarapyndan dolandyrylýar. Kebşirleme prosesinde robot bilen pozisioneriň arasynda sinhronlaşdyrylan hereketleri amala aşyryp bolýar.
Bu pozisioner köp burç bilen kebşirlenmeli iş bölekleri üçin amatlydyr we has çeýe kebşirleme işleri üçin we kebşirleme netijeliligini we hilini ýokarlandyrmak üçin kebşirleme robotlary bilen ulanylyp bilner.
Pozisioneriň tehniki parametri
| Model | JHY4030P-080 |
| Giriş woltajynyň nominal derejesi | Bir fazaly 220V, 50/60HZ |
| Motor izolýasiýasynyň kalibrleri | F |
| Iş stoly | Diametri 800 mm (öz islegiňize görä sazlap bolýar) |
| Agram | Takmynan 400 kg |
| Maksimum ýük | Ok boýunça ýük ≤300kg / ≤500kg / ≤1000kg (>1000kg öz islegiňize görä sazlanyp bilner) |
| Gaýtalanýanlyk | ±0.1mm |
| Duralga pozisiýasy | Islendik wezipe |
Robot iş ýeri komponentleri
| Önüm | Mukdar |
| 6 okly kebşirleme roboty | 1 toplum |
| 2 okly pozisioner | 1 toplum |
| Kebşirleme energiýasynyň çeşmesi | 1 toplum |
| Kebşirleme çyrasy | 1 toplum |
| Dolandyryş gutusy | 2 sany |
| Çyra arassalaýjy stansiýa | 1 toplum |
| Robot çyzykly rels | *m (isleg boýunça) |
| Lazer sensory | 1 toplum (isleg boýunça) |
| Howpsuzlyk çyrasy perdesi | 1 toplum (isleg boýunça) |
| Howpsuzlyk gaşy | *m (isleg boýunça) |
Näme üçin bizi saýlamaly?
1. Biz Hytaýda önümçilik üçin niýetlenen kebşirleme robotlarynyň biridiris.
2. Biz diňe robot öndüriji däl, eýsem pozisionerleri hem öndürýäris.
3. Robotlaşdyrylan integrasiýa taslamalarynda 10 ýyldan gowrak tejribe.
4. Robot dolandyryş ulgamyny ulanmak aňsat we ulanmak durnukly.
5. Robot dolandyryş ulgamy 12 okda çenli dolandyryp bilýär.
6. Biziň önümlerimiz Günorta-Gündogar Aziýada, Günbatar Aziýada, Ýewropada, Demirgazyk Amerikada, Günorta Amerikada, Awstraliýada we ş.m. 30-dan gowrak welaýata satyldy.
Önümleriň kategoriýalary
-

Uglerodly kebşirlemek üçin 2000 mm ýetýän kebşirleýji robot ...
-

Ýokary takyklykly RV reduktorly kebşirleýji pozisioner
-

Uglerodly polatdan ýasalan polatdan ýasalan Mig kebşirleýji robot...
-

6 okly suw bilen sowadylýan 500A kebşirleýji enjam MIG we...
-

JHY 6 okly robot goly senagat awtomatiki ýaý m...
-

Hytaýyň ýokary hilli alýumin kebşirleýji robot goly